Vision-Language Model-Enabled Task Planning and Motion Control for Dexterous Robot Manipulation
Date:
I was invited to give a talk at the EmbodiedAI (具身智能之心) Online Live. For more information, please refer to Project Page.
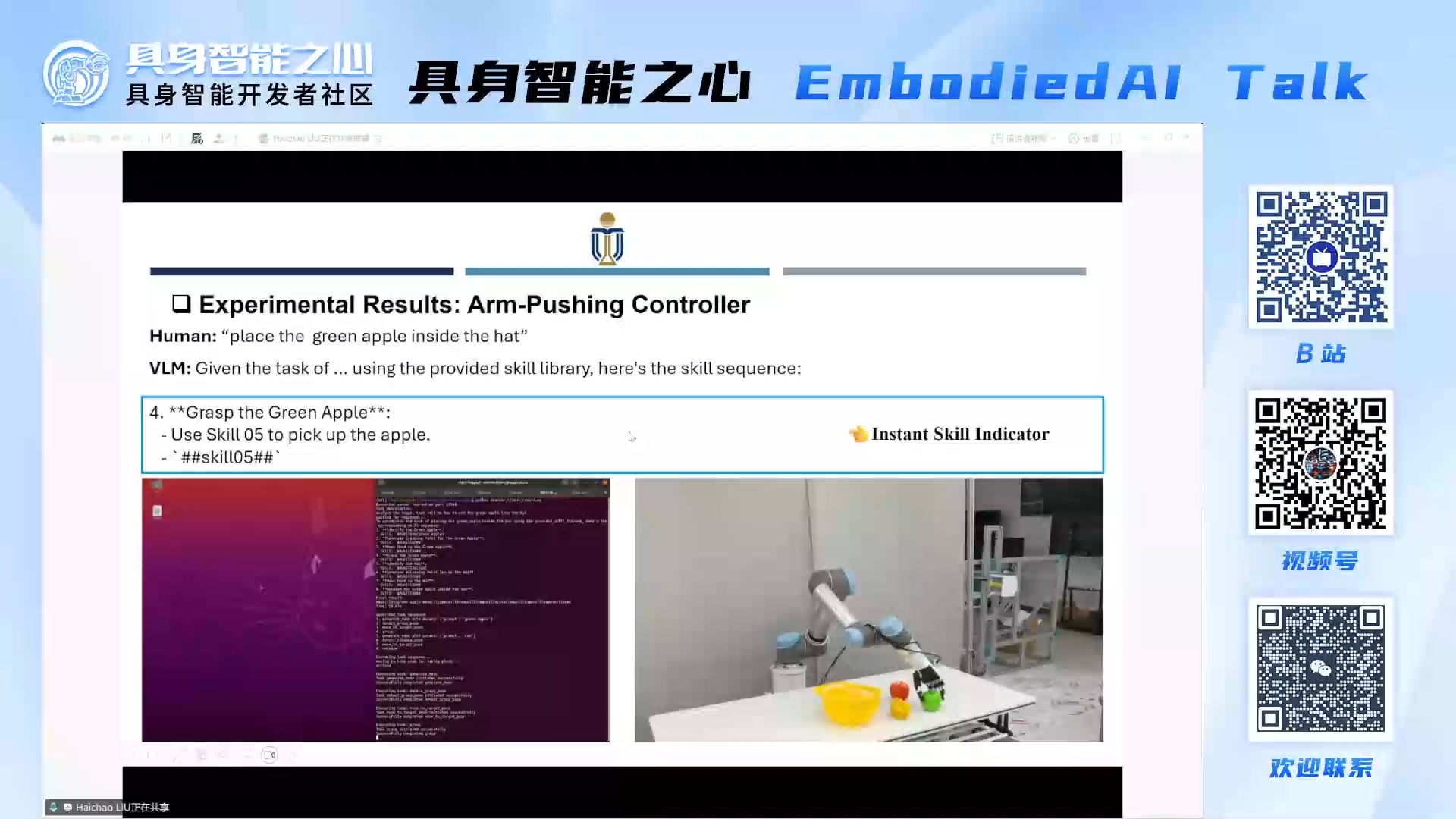
The video of the presentation is accessible at Live Talk.
The poster of the presentation is shown below: